Home
Experience
Posts
Projects
Publications
Contact
Light
Dark
Automatic
Computer Vision
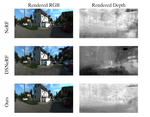
LIDAR Constrained NeRF on Outdoor Scenes
Extending the NeRF architecture to make it work on outdoor scenes.
PDF
Indirect Visual Odometry With Optical Flow
Extending a Stereo camera Visual Odometry implementation with Optical Flow.
PDF
Source Code
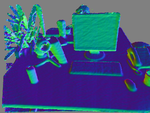
Kinect Fusion: Dense Surface Mapping and Tracking
Re-implementation of Kinect Fusion by
Newcombe et al
.
PDF
Video Presentation
Source Code
Cite
×