Indirect Visual Odometry With Optical Flow
 Stereo Camera and 3D landmarks
Stereo Camera and 3D landmarks
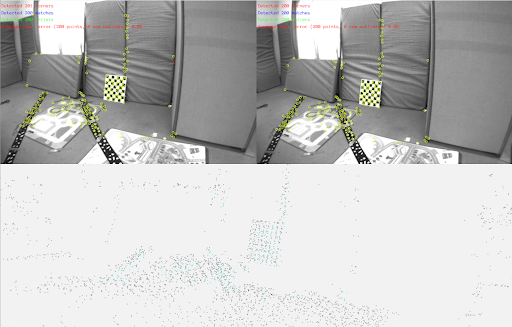
Extending a Stereo camera Visual Odometry implementation with Optical Flow per the paper by Usenko et al. Optical flow was used to track detected Keypoints through frames and again was used to carry them to the other camera to triangulate 3D points in the map.
- Initial implementation of a stereo Visual Odometry application from a provided template.
- Adopting an Optical Flow approach to track key points through frames.
- Using Optical Flow to move key points from one camera to the other.
- Using the key points matched from both cameras to triangulate 3D points for mapping.

A GIF of the complete working pipeline:

Yiğit Aras Tunalı
MSc. Student at Technische Universität München
My research interests include Computer Vision, Computer Graphics, Machine Learning and Simulations.