Home
Experience
Posts
Projects
Publications
Contact
Light
Dark
Automatic
Deep Learning
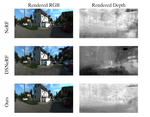
LIDAR Constrained NeRF on Outdoor Scenes
Extending the NeRF architecture to make it work on outdoor scenes.
PDF
Analysis and Experiments on Deep Closest Points Architecture
The goal of the project was to conduct experiments and analyze their results on the DCP architecture by
Wang et al
.
PDF
Source Code
Reconstruction of Textured Humans From Partial Scans
The goal of the project was to make
IF-Net and Texture IF-Net by Chibane et al
to work with real-world data scanned by a Kinect camera.
PDF
Cite
×